Our Research Projects
Our focus is on motion planning, task assignment and control of mutli-agent systems. We tackle challenges like energy utilization, failure resiliency, flow control, scalability, time complexity, etc in multi-agent systems. The developed ideas are applied and tested on real world systems and environments.

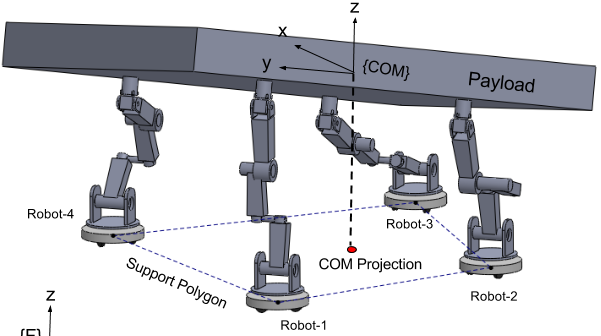
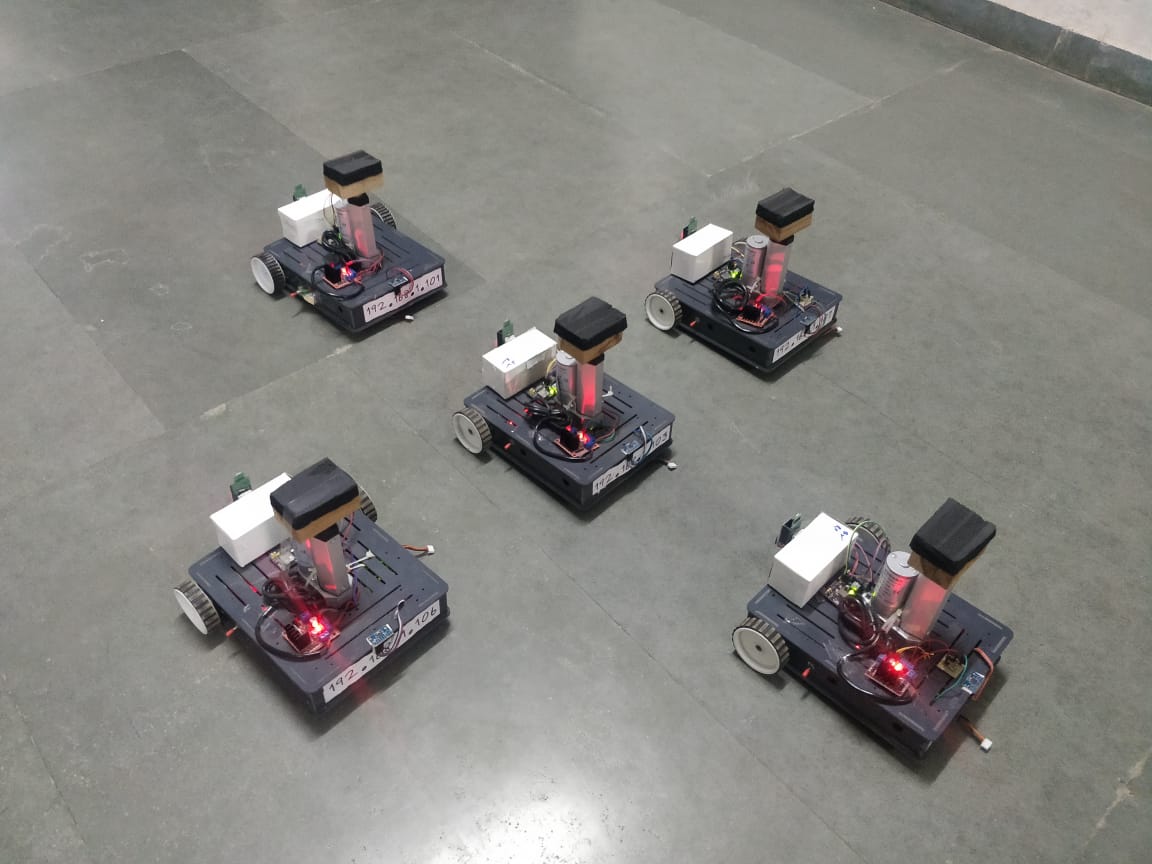
Flexible Payload Transport through Static and Dynamic Obstacles
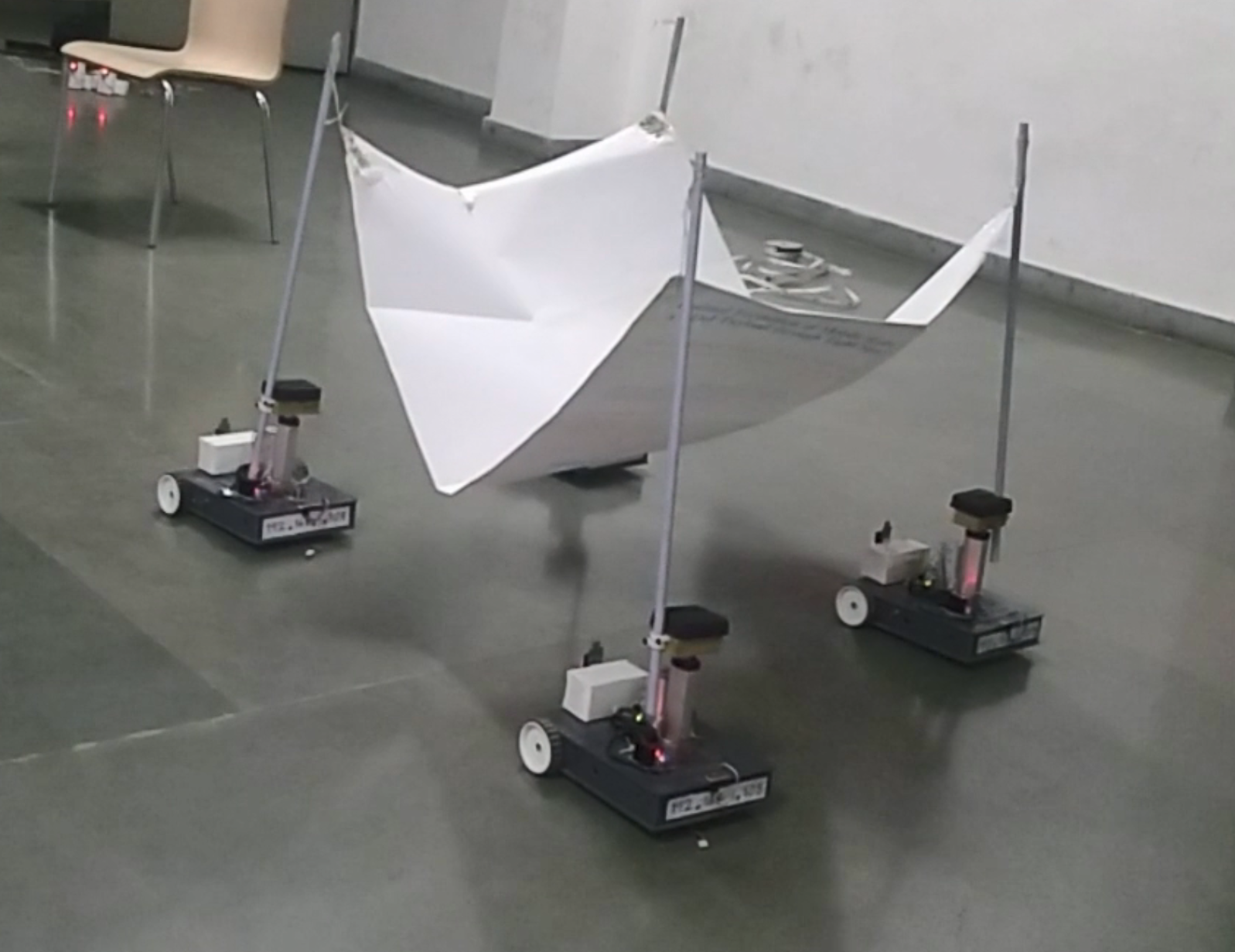
Transportation of Deformable Payload through Static and Dynamic Obstacles using multiple robots.
InsightsHuman Assisted Navigation for Payload Transport
Teleoperation of a robot in adverserial environments.
Insights
Formation Control of Robots using Reinforcement Learning
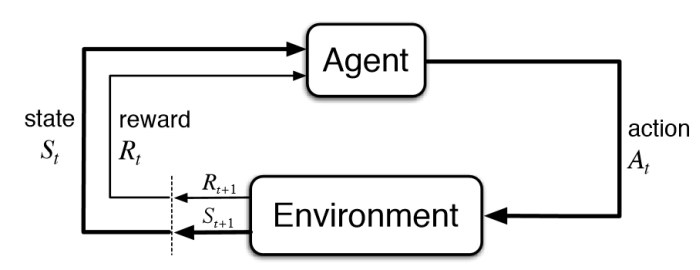
Deep reinforcement learning based local motion planning and formation control.
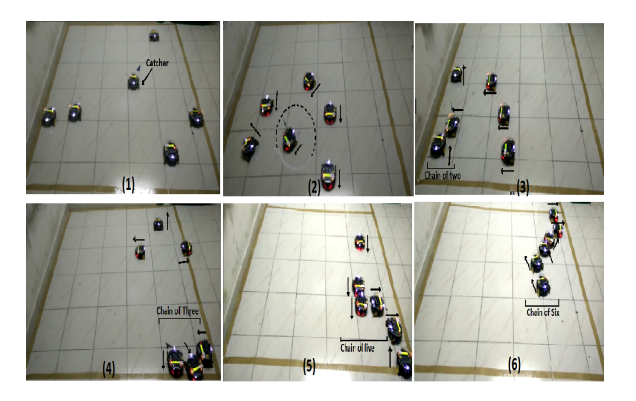
InsightsKinematic Control of Compliant Frame Multi-body Mobile Robots
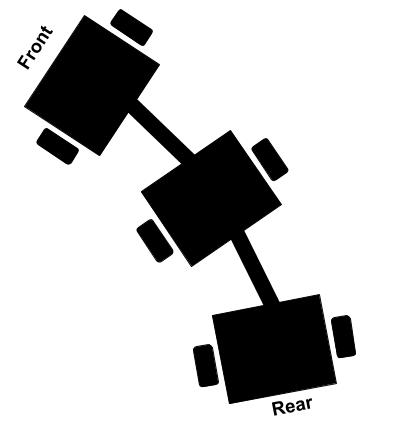
Path Planning and Kinematic control of a modular articulated multi-robot system.
Insights
MUST: Multi Agent Simulation of Multi-Modal Urban Traffic

System to simulate big cities with multi-modal traffic system with large number of agents.
InsightsFailure Resilient Robotic Soccer Strategy
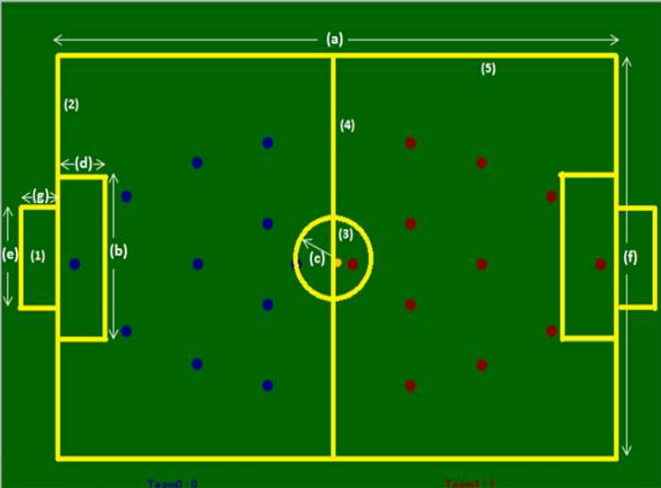
Fail safe robot soccer game simulation with 4-11 players ranging from four to eleven in each team.
Insights
Crowd Control using Multi-Agent Systems
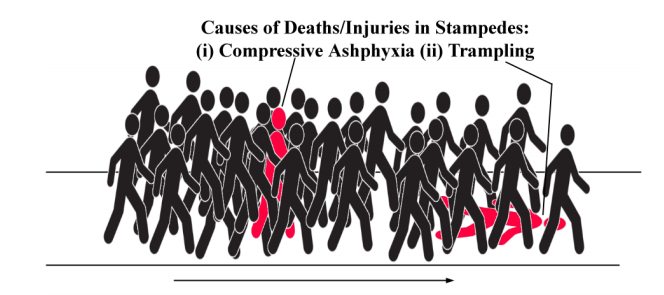
Multi-Agent Simulations and methodologies to solve population and crowding problems.
Insights