Actuated Multi-Wheel Energy and Wear Conscious Payload Transport Robot
Each wheel with its associated motor are modeled as agents with limited sensing, battery and communication. The robot chassis has a provision to transport a payload. The control algorithm uses the concepts of multi-agent learning, task allocation and scheduling to transport the payload efficiently
- Status: In Progress
- Guide: Prof. Kamalakar Karlapalem
- Team: Rahul Tallamraju, Venkatesh Sripada, Kaushik Palla, Pulkit Verma
- Goal: To ensure energy efficiency, wear reduction and failure resilience using concepts of multi-agent systems
We present an actuated multi-wheel payload transport robot that is conscious of energy and motor wear while transporting a payload on a flat terrain. In conventional four wheel electronically controlled robots, all wheels are actuated by motors all the time, and failure of even a single motor might render the system unusable. Unlike conventional mobile robots, our system consists of multiple free moving wheels that can optionally be actuated and deactivated. Failure of a few motors in the multi-wheel system will not affect overall operation. With each wheel-motor combination modeled as components of an agent, the system makes use of an optimal subset of active agents in achieving this objective. We present a novel system control architecture, kinematic and dynamic model of a nine wheel system, optimization to identify control inputs and number of active agents for achieving high operational efficiency, optimization for velocity profile generation and round-robin task allocation model for agents. We present initial experimental results for a built model of the system. The system has immense utility in transporting payloads for long distances, with reduced power consumption and motor wear.
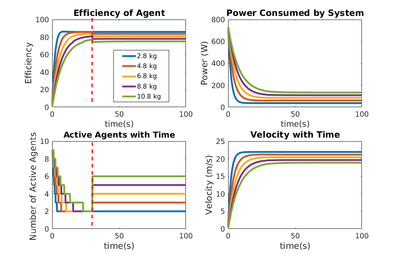
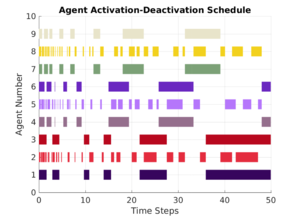
Plot 1 showing efficiency of each agent not varying severly despite change in applied load (2.8 to 10.8 kg), it also shows the change in number of active agents with the load increase. It is advantageous that all agents are active all the time. Plot 2 shows the agent activation deactivation schedule for 4 active agents per time instant at near constant velocity. Click here for a detailed project description.